When he first envisioned the electroadhesive clutch, Steve Collins made a prototype with a sandwich bag and a couple of pieces of aluminum foil from his kitchen. Since creating that makeshift prototype, he and his research team have developed a sophisticated, functional device that can be used in exoskeletons that compensate for a person’s disability or enhance their athletic performance.
The team presented their work at the Human 2.0 workshop at IEEE’s International Conference of Robotics and Automation 2016 in Stockholm, Sweden to demonstrate how wearable robotics can assist and improve physical ability.
Collins, an associate professor of mechanical engineering at Carnegie Mellon University, has a record of making the seemingly impossible happen. Last year, his team developed a lightweight, unpowered, wearable exoskeleton—the walking assist clutch—that reduced the energy expended in walking, a feat that scientists have been attempting unsuccessfully for more than a century. The work was featured in the journal Nature in 2015.
Building on that research, Collins’ team wanted to push the boundaries of the technology even further by creating a general-purpose clutch that offered increased functionality while being lightweight and consuming very little energy.

Their device has impressive features: it is three to 30 times lighter than other clutch mechanisms with the same holding force; it consumes 340 to 750 times less energy compared to previous devices; and it operates at four to 20 times lower voltage than previous electrostatic components in robots.
“We knew that electrostatic adhesion was key to developing a responsive, adjustable device, but our early prototypes were plagued by high voltage requirements and undesired sticking when the clutch was turned off,” said Collins. “We had to look outside of our field to the area of materials for a solution.
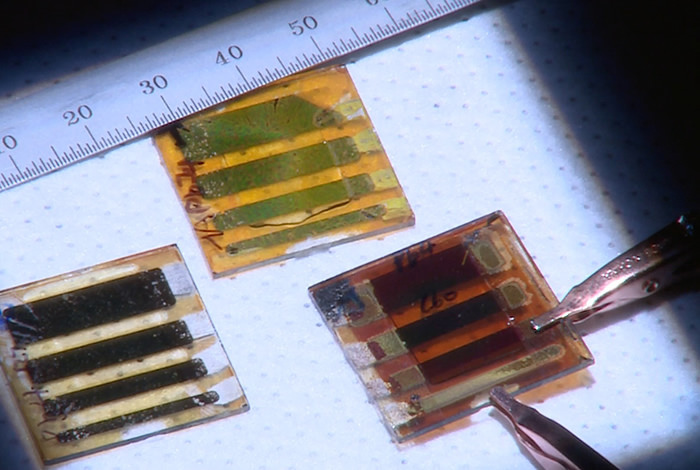
Enter collaborator Carmel Majidi, also of the mechanical engineering department, who specializes in stretchable electronics, soft robotics, and wearable computing. Working with Stuart Diller, a Ph.D. student who co-authored the study, they found the right combination in aluminum, Mylar, and Luxprint (an insulating material developed by DuPont) that could easily integrate into a wearable system.
“Mylar is thin, flexible, and has a good strength to weight ratio—but isn’t conductive,” Majidi explained. “Aluminum foil is conductive but dense and tears easily. In order to have the flexibility, strength, conductivity and low mass necessary for an electroadhesive clutch, we used Mylar coated with an ultra-thin layer of aluminum.” He also noted, “the Luxprint we used as the dielectric has the properties that are necessary for high adhesion at low voltage.”
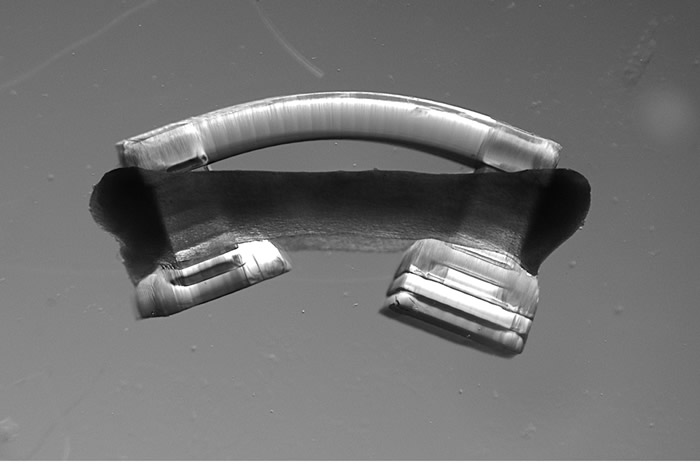
The layer of Luxprint separates the two sheets of aluminum-coated Mylar, allowing a strong electric field to develop when voltage is applied. The electrons on one side are attracted to the protons on the other, causing the sheets to stick together and preventing sliding.
The charge can develop quickly, and power consumption is low because the electrons don’t flow across the Luxprint. When the voltage is removed, the electrons equalise and the coated Mylar sheets just slide against each other.
This leads to a lightweight, low-power clutch that can engage and disengage quickly, setting the stage for devices with many clutches acting together. One application is for selectable stiffness exoskeletons.
“Selectable stiffness is important for making a lightweight exoskeleton practical for everyday use,” explained Diller. “The exoskeleton would be able to assist you in the best way for many different activities, such as running, hill climbing, or carrying different loads of weight. Think of how this could improve mobility for the elderly, assist workers carrying heavy loads while traveling on foot, or help athletes train for competition.”
Another application is for energy recycling actuators. These devices can lock in energy and then return it later—similar to the way regenerative braking works in a vehicle. The team is currently working on a new design for this application using the clutches. The most exciting aspect of this device, though, may be its role in the future designs of wearable robotics and autonomous robots.
More information: Carnegie Mellon University College of Engineering