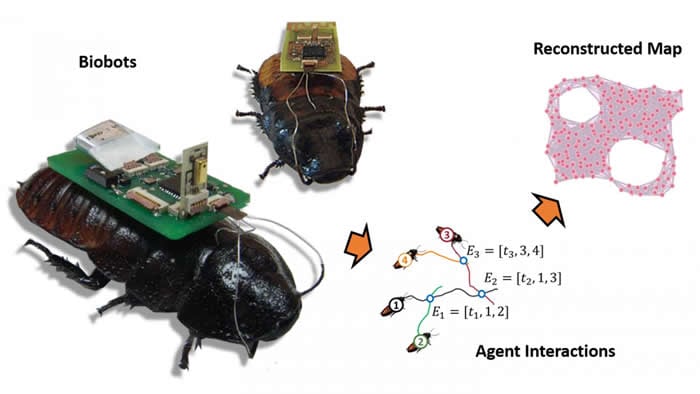
A combination of software and hardware has been developed to allow unmanned aerial vehicles (UAVs) and insect cyborgs, or biobots, to map large, unfamiliar areas, such as a collapsed building after a natural disaster.
“The idea would be to release a swarm of sensor-equipped biobots – such as remotely controlled cockroaches – into a collapsed building or other dangerous, unmapped area,” said Edgar Lobaton, an Assistant Professor of Electrical and Computer Engineering at NC State and co-author of two papers describing the work.

Lobaton continued: “Using remote-control technology, we would restrict the movement of the biobots to a defined area. That area would be defined by proximity to a beacon on a UAV. For example, the biobots may be prevented from going more than 20 meters from the UAV.”
The biobots would be allowed to move freely within a defined area and would signal researchers via radio waves whenever they got close to each other. Custom software would then use an algorithm to translate the biobot sensor data into a rough map of the unknown environment.
As enough data to map the defined area is received, the UAV will move forward to hover over an adjacent, unexplored section.
Moving with it the biobots ensure the mapping process is repeated. The software program then stitches the new map to the previous one. This can be repeated until the entire region or structure has been mapped; that map could then be used by first responders or other authorities.
“This has utility for areas – like collapsed buildings – where GPS can’t be used,” Lobaton said. “A strong radio signal from the UAV could penetrate to a certain extent into a collapsed building, keeping the biobot swarm contained. And as long as we can get a signal from any part of the swarm, we are able to retrieve data on what the rest of the swarm is doing. Based on our experimental data, we know you’re going to lose track of a few individuals, but that shouldn’t prevent you from collecting enough data for mapping.”
Co-lead Author Alper Bozkurt, an Associate Professor of Electrical and Computer Engineering at NC State, has previously developed functional cockroach biobots. However, to test their new mapping technology, the research team relied on inch-and-a-half-long robots that simulate cockroach behavior.
In their experiment, researchers released these robots into a maze-like space, with the effect of the UAV beacon emulated using an overhead camera and a physical boundary attached to a moving cart. The cart was moved as the robots mapped the area.
“We had previously developed proof-of-concept software that allowed us to map small areas with biobots, but this work allows us to map much larger areas and to stitch those maps together into a comprehensive overview,” Lobaton said.
Lobaton added: “It would be of much more practical use for helping to locate survivors after a disaster, finding a safe way to reach survivors, or for helping responders determine how structurally safe a building may be.
“The next step is to replicate these experiments using biobots, which we’re excited about.”
More information: EurekAlert!