While robots have been a great help in accelerating deep-sea exploration, clunky robotic hands collecting fragile specimens of coral and sponges from the ocean floor, can sometimes pose a challenge.
After recognizing the need for better equipment, David Gruber, a marine biologist from Baruch College and Robert J. Wood, and engineer and roboticist from Harvard University teamed up to create soft, squishy robotic fingers to assist in underwater exploration.
“They were using rigid Jaws of Life-type grippers designed for the oil and gas industry that were totally overpowered and were destroying things,” said Wood. “It immediately clicked that there was a soft robotics solution that may be viable.”

The new technology could help researchers collect samples from largely unexplored habitats thousands of feet beneath the ocean surface, as well as assisting in underwater archaeology.
Currently, researchers rely on remotely operated vehicles (ROVs) that come equipped with standard-issue robotic “hands” that are not suited to collect delicate coral, sponge and other samples. The equipment was initially designed for undersea construction and to install and repair submerged pipelines.
So, Wood channeled help from a mechanical engineer, Kevin Galloway, from the Wyss Institute to develop two types of hands to replace the ROV’s metal gripper, both that could gently recover objects of different sizes and shapes. One of the hands was inspired by the coiling action of a boa constrictor and can access tight spaces and clutch small and irregular-shaped objects, and the other, a bellows-style model, with opposing pairs of bending actuators.
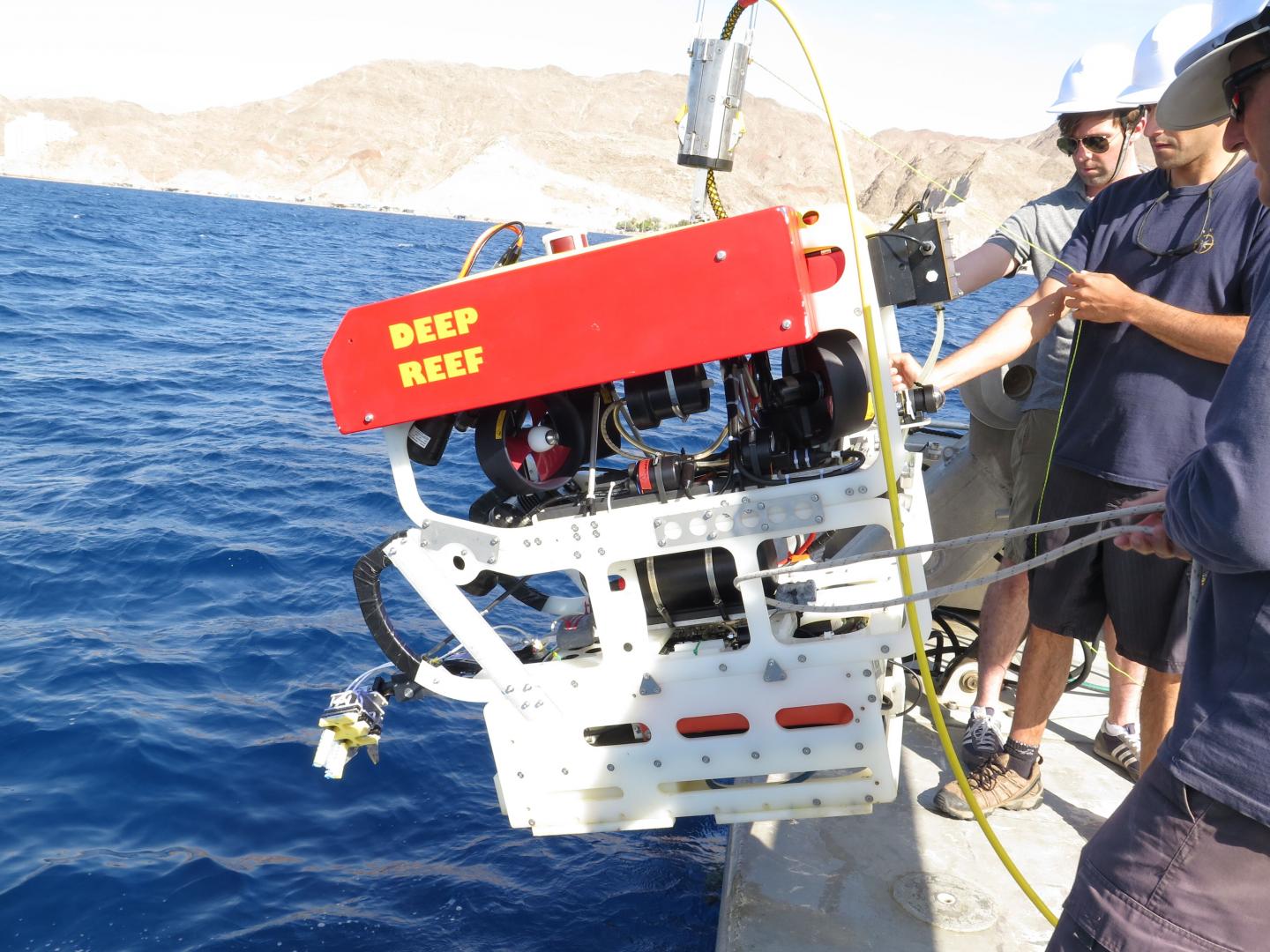
The scientists tested the new sets of hands in Israel’s Gulf of Eilat in the northern Red Sea where they conducted more than a dozen dives up to 558 feet. The researchers were able to manipulate the grippers to retrieve samples of delicate ) red soft coral and coral whips and bring them up to the surface unharmed.