EPFL researchers developed a method that allows a flapping-wing robot to land autonomously on a horizontal perch using a claw-like mechanism. The act of perching is a delicate balance of timing, high-impact forces, speed, and precision. Until now, not a single robot could do it.
In a recent Nature Communications paper, researchers at the Laboratory of Intelligent Systems (LIS) and Biorobotics ab (BioRob) in the School of Engineering describe the landing gear that makes such perching possible.
Once landed, the robot can carry out specific tasks, such as unobtrusively collecting biological samples or measurements from a tree. It could provide a more efficient way for ornithopters to recharge using solar energy, potentially making them ideal for long-range missions.
The engineering problems required managing many factors that nature has already perfected. The ornithopter must slow down significantly as it perched while still maintaining flight. The claw needed to be strong enough to grasp the perch and support the robot’s weight without being so heavy that it could not be held aloft.
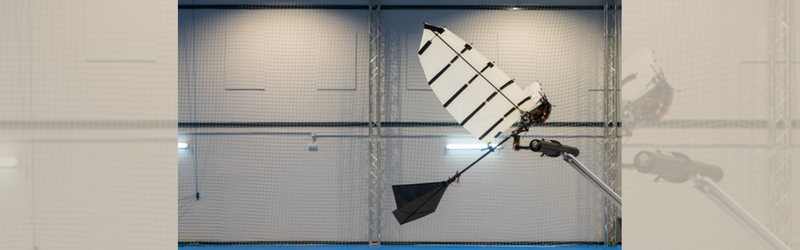
The ornithopter has a fully onboard computer and navigation system, complemented by an external motion-capture system to help it determine its position. They calibrated the ornithopter’s leg-claw appendage to compensate for the up-and-down oscillations of flight as it attempted to grasp the perch. The claw absorbed the robot’s forward momentum upon impact. The researchers are already thinking about how their device could be expanded and improved, especially in an outdoor setting.