While robots can perform a plethora of outrageous and daring tasks, it’s sometimes difficult for them to take part in every day activities like holding a pen properly — or any other tasks
A team of computer science and engineering researchers from the University of Washington has given robots some more dexterous in-hand manipulation abilities. In addition the robotic hand is capable of learning from its own experience without requiring human intervention or direction.
“Hand manipulation is one of the hardest problems that roboticists have to solve,” said Vikash Kumar, a UW doctoral student in computer science and engineering. “A lot of robots today have pretty capable arms but the hand is as simple as a suction cup or maybe a claw or a gripper.”
The $300,000 UW five-fingered robot hand took years to custom build, requiring the development of an accurate simulation model that enables a computer to analyze movements in real time.
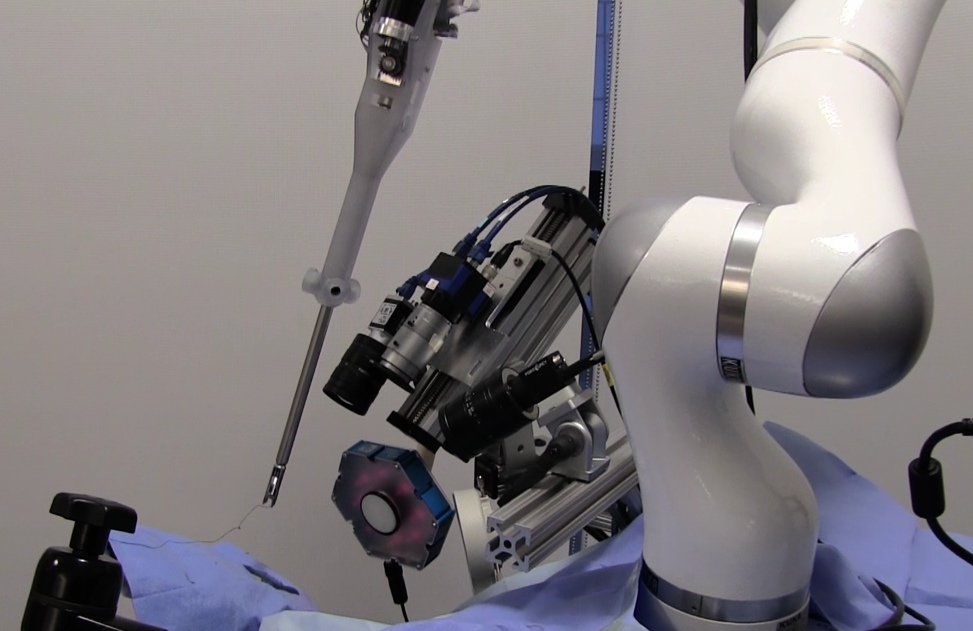
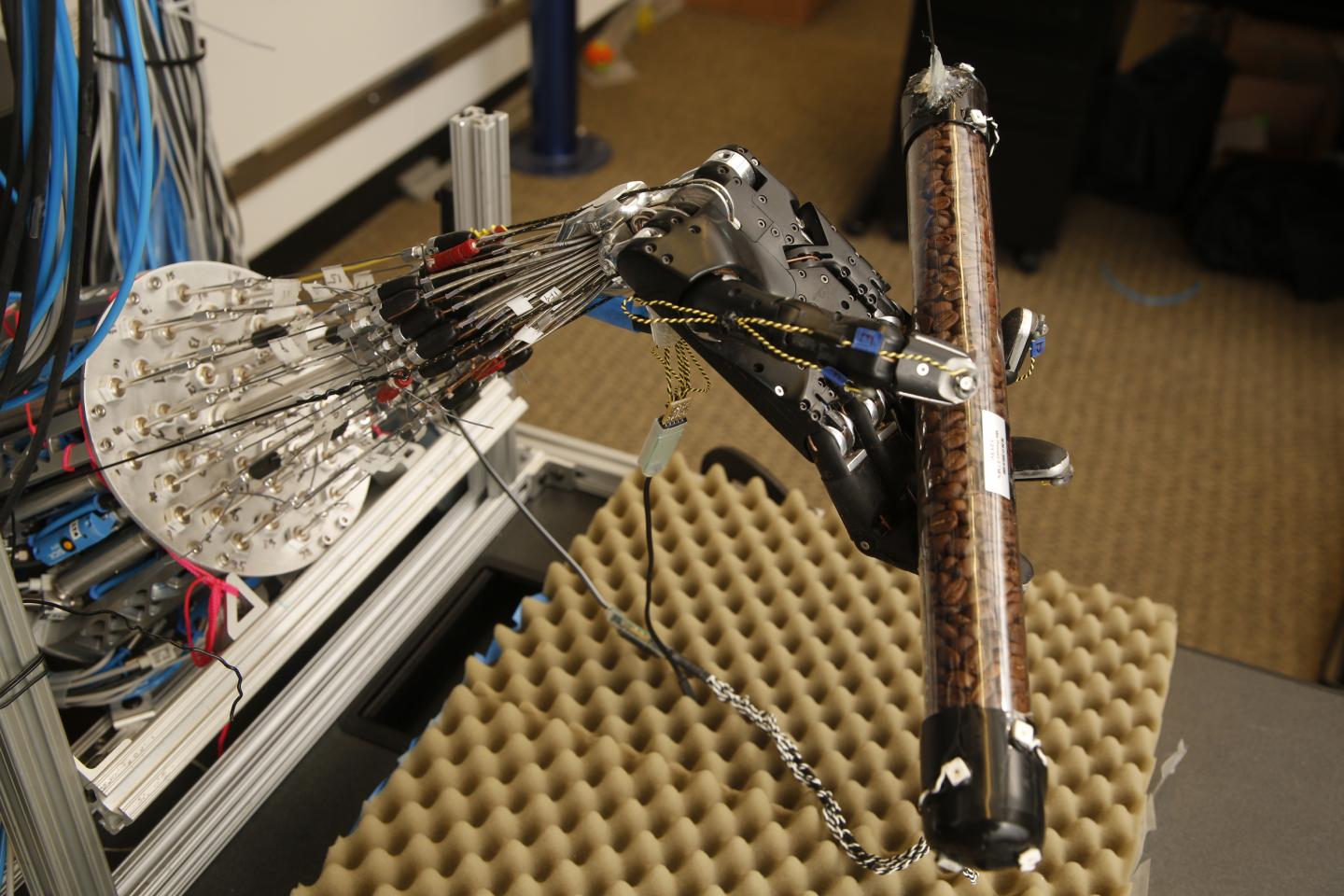
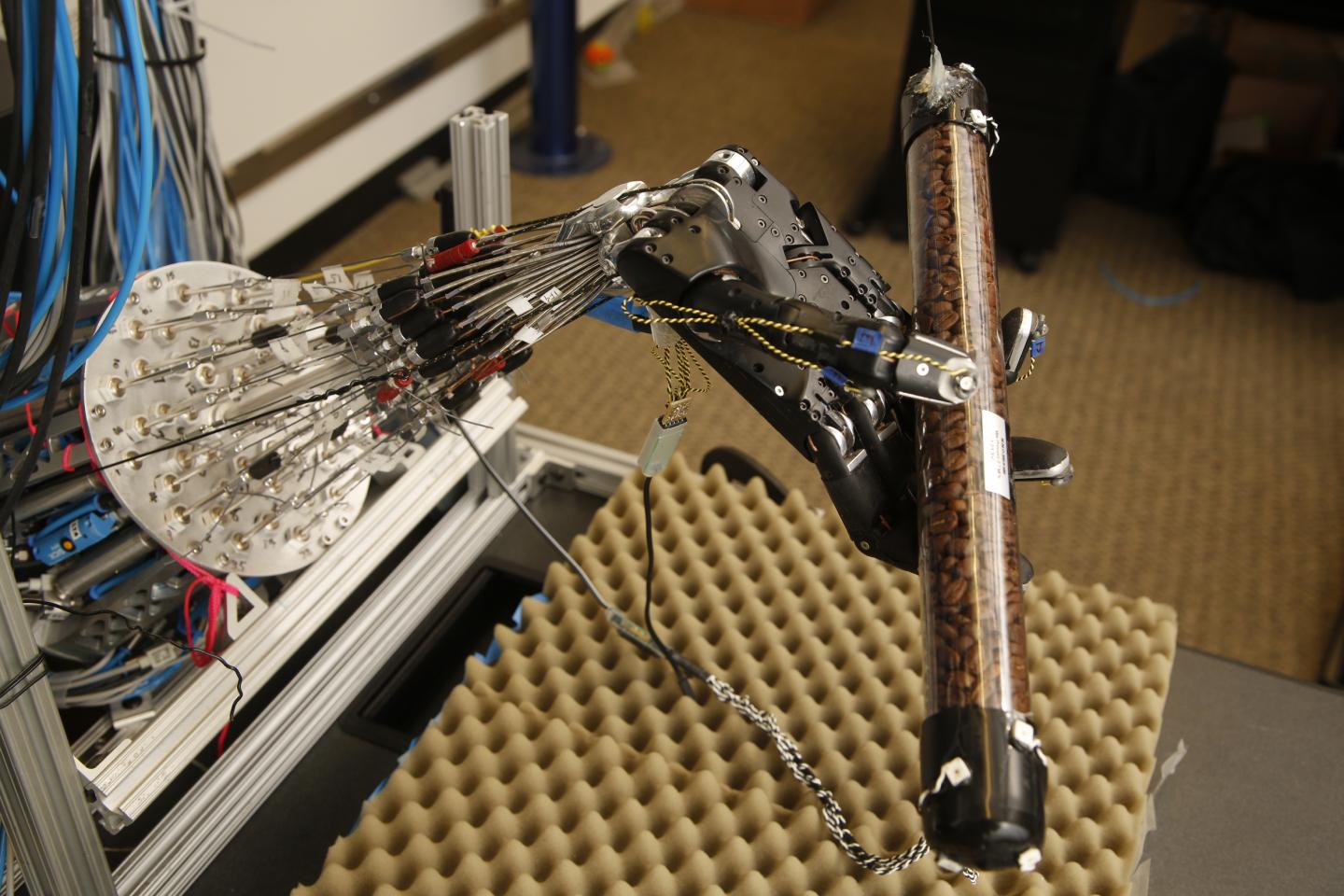
The team’s latest demonstrations show that the their robotic hand can perform real-world tasks like rotating elongated object. Each time the robot tried to perform the task, it became more skilled at spinning the tube, as a result of its machine-learning algorithms, which helped it model the physics involved and then plan the next required actions.
“Usually people look at a motion and try to determine what exactly needs to happen –the pinky needs to move that way, so we’ll put some rules in and try it and if something doesn’t work, oh the middle finger moved too much and the pen tilted, so we’ll try another rule,” said Emo Todorov, UW associate professor of computer science and engineering and of applied mathematics.
The researchers had to face design and control challenges in the development of the hand — making sure the hand had enough speed, strength, responsiveness, and flexibility to mimic a human hand.
The robot employs a Shadow Hand skeleton actuated with a custom pneumatic system and can actually move faster than a human hand. Unfortunately, it is too expensive for routine commercial or industrial use, but it does allow the researchers to test innovative control strategies and further other aspects of robotic dexterity.
“There are a lot of chaotic things going on and collisions happening when you touch an object with different fingers, which is difficult for control algorithms to deal with,” said Sergey Levine, UW assistant professor of computer science and engineering who worked on the project as a postdoctoral fellow at University of California, Berkeley. “The approach we took was quite different from a traditional controls approach.”
Now that the team has demonstrated local learning with the hardware system, it will now begin to demonstrate global learning, which means the hand could figure out how to manipulate an unfamiliar object or a new scenario it hasn’t encountered before.
Watch the robot in action.