A robot hand developed at the Korea Institute of Machinery & Materials (KIMM) can handle objects the same way human hands do. The robot hand mimics the structure and motion of human fingers, and can handle a variety of objects, including holding an egg, cutting papers with a pair of scissors, waving, and even playing the piano. It can be easily mounted on a variety of robot arms and offers the world’s strongest grasping force against its own weight.
The team was led by Dr. Hyunmin Do, principal researcher at the Department of Robotics and Mechatronics under the Advanced Manufacturing Systems Research Division of KIMM. With four fingers and 16 joints, the developed robot hand uses 12 motors to move each finger and joint independently.
The research team developed a unique mechanism to support movement in small spaces with a high degree of freedom, similar to the motion of a human hand. They succeeded in modularizing the driving unit responsible for finger movement by embedding it inside the palm. The robot hand can be easily mounted on a variety of robot arms.
In addition, the developed robot hand is lighter and stronger than commercially available robot hands. Its weight is less than 1 kg (2.2 lbs), but payload is more than 3 kg (6.6 lbs).
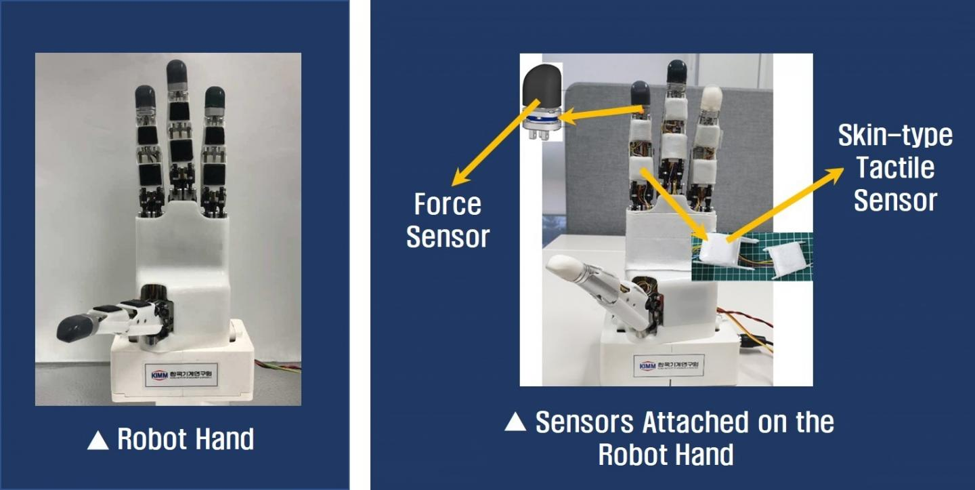
The research team developed two types of force sensors to allow tactile sensing to detect contact with objects, and attached them to the fingertips, fingers and the palm. The sensors attached to fingertips are multi-axis force/torque sensors with a diameter of 15 mm and a weight of less than 5 g. They can measure the magnitude and direction of force detected at the fingertip when the robot hand comes into contact with an object. The sensors are the key to controlling the grasping force.
Skin-type tactile sensors developed through joint research with Seoul National University were also attached to fingers and the palm. These sensors measure the force distribution at the contact area when the robot hand touches an object.
Commercial robot hands developed so far have limited applications, as there are no modularized products equipped with both the driving units embedded inside the palm area and the built-in tactile sensors.
Dr. Do said, “The robot hand was developed to handle various objects including the tools in everyday life by mimicking the delicate motion of a human hand. It is also expected to be used as a research platform for studying the grasping algorithm of robot hand and manipulation intelligence.”