By Carolyn Mathas
There is a lack of robot dexterity partly because artificial grippers are missing the fine tactile
sense of the human fingertip. Two papers published in the Journal of the Royal Society Interface
provide the first in-depth comparison of an artificial fingertip with neural recordings of the
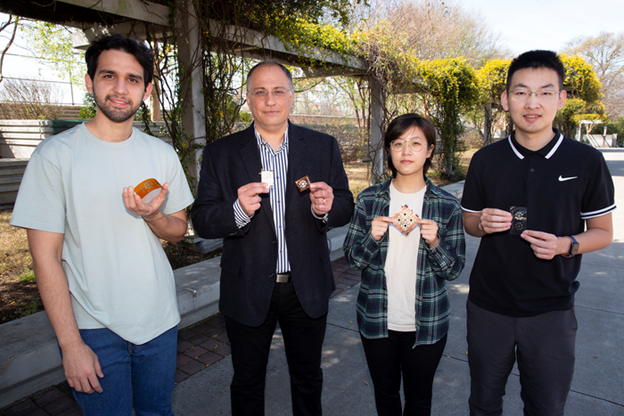
human sense of touch. The research was led by Professor of Robotics & AI, Nathan Lepora,
from the University of Bristol’s Department of Engineering Math and based at the Bristol Robotics Laboratory.

CREDIT: PROF. NATHAN LEPORA
Professor Lepora and colleagues created the sense of touch in the artificial fingertip using a 3D-
printed mesh of pin-like papillae on the underside of the compliant skin, mimicking the dermal
papillae between the outer and inner dermal layers of human tactile skin. The papillae are made
on advanced 3D-printers that can mix soft and hard materials to create complicated structures
like those found in biology.
Although the research indicates that it was close, it was not as sensitive to fine detail. 3D-printed
skin is thicker than real skin and his team is now exploring how to 3D-print structures on the
microscopic scale of human skin.
The papers are:
‘Artificial SA-I, RA-I and RA-II/vibrotactile afferents for tactile sensing of texture,’ by Pestell, N.
& Lepora, N. in Journal of the Royal Society Interface. DOI: 10.1098/rsif.2021.0603
‘Artificial SA-I and RA-I afferents for tactile sensing of ridges and gratings,’ by Pestell, N.,
Griffith, T. and Lepora, N. in Journal of the Royal Society Interface. DOI:
10.1098/rsif.2021.0822