Researchers at Massachusetts Institute of Technology’s Department of Mechanical Engineering have given a two-legged robot named HERMES some balance and human-like reflexes.
Picture this: You punch a wall, but because you have good reflexes and sense of balance, you don’t (hopefully) fall through the wall as you punch it. A robot wouldn’t be as lucky since it doesn’t come with the same coordination humans possess.
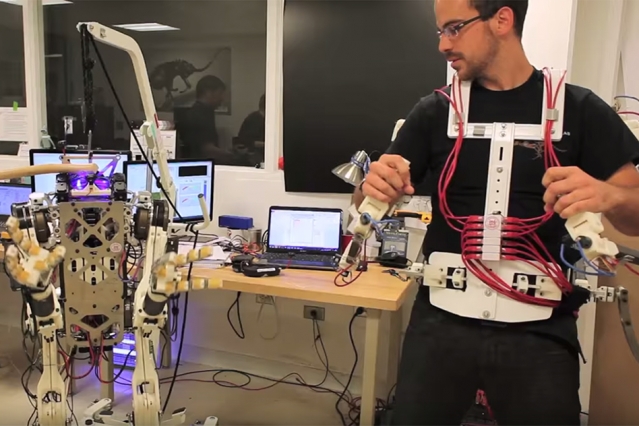
MIT engineers wanted to change that, so PhD student Joao Ramos and his colleagues set HERMES up with a unique balance-feedback interface that allows it to maintain its balance.
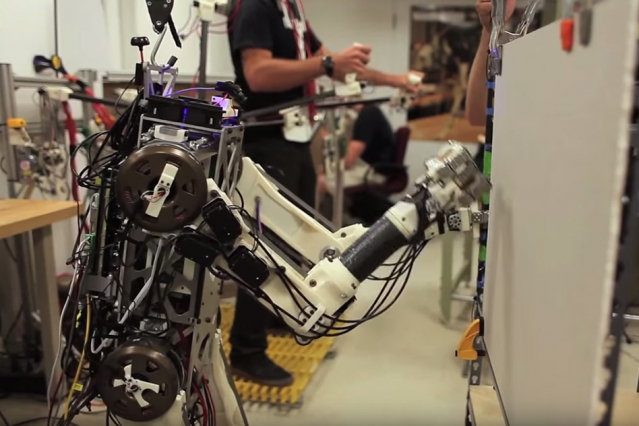
To test out the robot, Ramos wore an exoskeleton equipped with wires and motors while standing on a platform — then began performing some actions that the robot mimicked: punching through drywall, smashing soda cans, kicking over trash buckets, and karate-chopping boards in half.
“The interface allows a human to remotely feel the robot’s shifting weight, and quickly adjust the robot’s balance by shifting his own weight. As a result, the robot can carry out momentum-driven tasks — like punching through walls, or swinging a bat — while maintaining its balance,” according to a MIT news release.
By using the interface, the robot can take advantage of a human’s reflexes, giving it faster reaction times than robots that adjust their balance based on visual feedback from on-board cameras.
Next, the team wants to try more complex coordinated movements like swinging an axe or opening a spring-loaded door, actions that are typically very difficult for robots because if a robot is stiff while pushing the door open, it would probably fall over. Tasks like these require a shift in body weight and the ability to catch yourself.
Ramos and the team would like to see HERMES perfect its coordination skills so that it can take up work at disaster sites. The envision that the robot would explore the area but be guided remotely by a human operator from a separate location.
“We’d eventually have someone wearing a full-body suit and goggles, so he can feel and see everything the robot does, and vice versa,” said Ramos in a release. “We plan to have the robot walk as a quadruped, then stand up on two feet to do difficult manipulation tasks such as open a door or clear an obstacle.”