


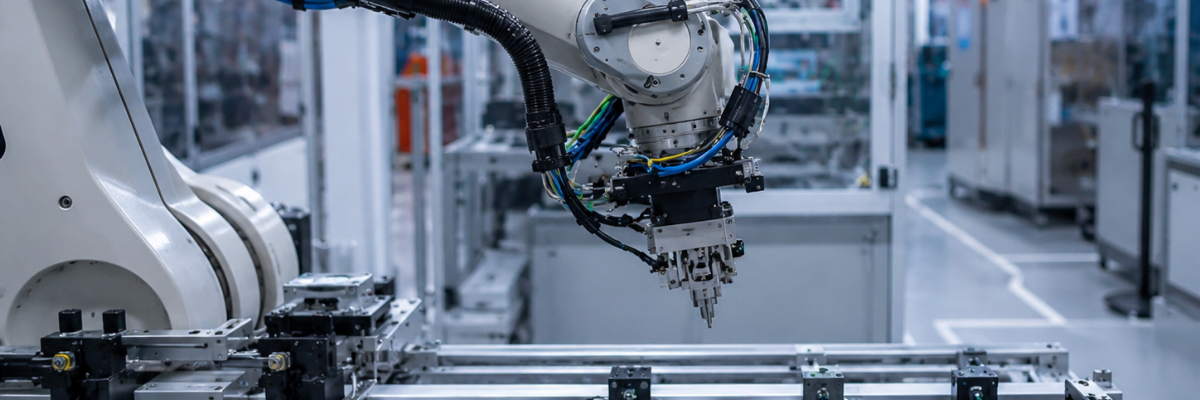
Industrial robots used to live relatively predictable lives. Many of them sat behind cages, repeated the same motions thousands of times each day, and were equipped with a limited number of sensors and controllers. Connectivity was important, but it wasn’t a primary design challenge for those robots.
It’s different for robots today.
Autonomous mobile robots (AMRs) are navigating warehouses independently. Collaborative robots (co-bots) are working right alongside humans. Humanoid robots are walking right out of research labs and into the real world. This is happening while machine vision, AI processing, force sensing, and real-time decision making are becoming standard features.
Now that robots are more capable, they need more power and data. Engineers have more to think about than designing robots that move efficiently. They now have to determine how to deliver power to dozens of actuators, move high-speed data between sensors and processors, and keep communication reliable through systems that are constantly moving.
As a result, connectors, which were once just supporting components in systems, are now increasingly more important to overall robotic system performance.
More Capability=More Connections
A modern robot can have cameras, LiDAR systems, force sensors, encoders, motor drives, battery management systems, AI accelerators, networking hardware, and safety systems. Every time a new capability is introduced, so are additional power and communication requirements.
For example, in a humanoid robot with dozens of independently controlled joints, each joint must have power, control signals, and feedback data. When you add vision systems, microphones, and onboard computing, the amount of connectivity required grows quickly.
Because what appears to be a single machine is really a collection of interconnected subsystems that have to operate together in real time.
The Power Challenge
Robotic complexity creates a growing power demand. Motors and actuators are still some of the largest consumers of energy in most robotic platforms. When robots get larger and more mobile, designers have to distribute the power efficiently across various moving assemblies while trying to minimize weight and space requirements.
As robots become more powerful, delivering power safely throughout the system becomes important. Traditional bolted power connections can add assembly complexity and make maintenance more difficult. Manufacturers have developed high-current connector systems that provide secure electrical connections while simplifying installation and serviceability.

Amphenol’s SurLok Plus connectors are one example. Originally developed for high-power applications such as energy storage and electrification systems, the connectors combine high current capability with a quick-locking design that eliminates the need for threaded connections. This approach can simplify assembly while helping maintain reliable power delivery in demanding applications.
The Data Challenge
Power is only part of the story when it comes to the new demands of modern robots. These robots see more of the world than ever before. Machine vision systems create large amounts of data that must be transferred to processors for analysis. AI-enabled robots often combine information from multiple cameras and sensors at the same time, creating bandwidth requirements that wouldn’t have been common in robotics even just a few years ago.
Moving camera, sensor, and control data through a robot requires more than simply increasing bandwidth. Signal integrity, EMI protection, connector density, and environmental durability all become important considerations, particularly as robots move into electrically noisy industrial environments.

This has driven the adoption of industrial Ethernet connector systems that combine high-speed communications with ruggedized designs. TE Connectivity’s M8 and M12 portfolio is an example of this, as they support Industrial Ethernet networks while providing sealing, vibration resistance, and standardized interfaces commonly used throughout factory automation equipment.
Motion Changes Everything
Today’s robots are rarely stationary, unlike a lot of other electronic systems. Every time a robot bends, rotates, extends, or creates any other type of movement, stress is placed on cables and connectors. Components that work well in fixed industrial equipment may encounter challenges when installed on a robotic arm or mobile platform.
Repetitive flexing, vibration, and continuous movement can eventually affect electrical and mechanical performance. Therefore, designers often evaluate factors like mating cycles, cable routing, strain relief, and vibration resistance alongside traditional electrical specifications.
To address this, connector manufacturers have been working on interconnect solutions designed specifically for these space-constrained, high-motion environments. These solutions will often include compact form factors, secure locking mechanisms, and ruggedized designs that help maintain reliable communication even with the constant motion and vibration.
One example of these types of connectors is TE Connectivity’s Industrial Mini I/O connectors.

These were designed as a smaller alternative to traditional RJ45 connections and support Industrial Ethernet communications while helping designers reduce space requirements in robotics, motion control, and automation equipment. By combining high-speed data transmission with a compact, vibration-resistant design, solutions like these help support the growing connectivity demands of modern robotic systems.
Reliability is a System-Level Requirement
Another consideration is downtime. As robots move into warehouses, hospitals, and public places, a failed connector can disable a sensor, interrupt communications, and take an entire subsystem offline. In many cases, these consequences are far harsher than a single component failure.
This is one of the main reasons that environmental protection, vibration resistance, and serviceability have become important selection criteria. Connector systems designed for industrial environments help protect against dust, moisture, and other conditions that can compromise reliability over time.
Today’s robotics designers face challenges that go beyond connecting components together. They must create an interconnected infrastructure that can support these highly sophisticated machines that operate in even more demanding environments.
And as these robots evolve, the demands placed on connectors will also evolve.




