Purdue University researchers are using a technology comparable to “mini force fields” to control individual microrobots operating within groups.
According to assistant professor of mechanical engineering at Purdue University, David Cappelleri, this is the first time they’ve been able to accomplish this task — until now, researchers could only control groups of microbots, not individual ones.
“The reason we want independent movement of each robot is so they can do cooperative manipulation tasks,” said Cappelleri. “Think of ants. They can independently move, yet all work together to perform tasks such as lifting and moving things. We want to be able to control them individually so we can have some robots here doing one thing, and some robots there doing something else at the same time.”
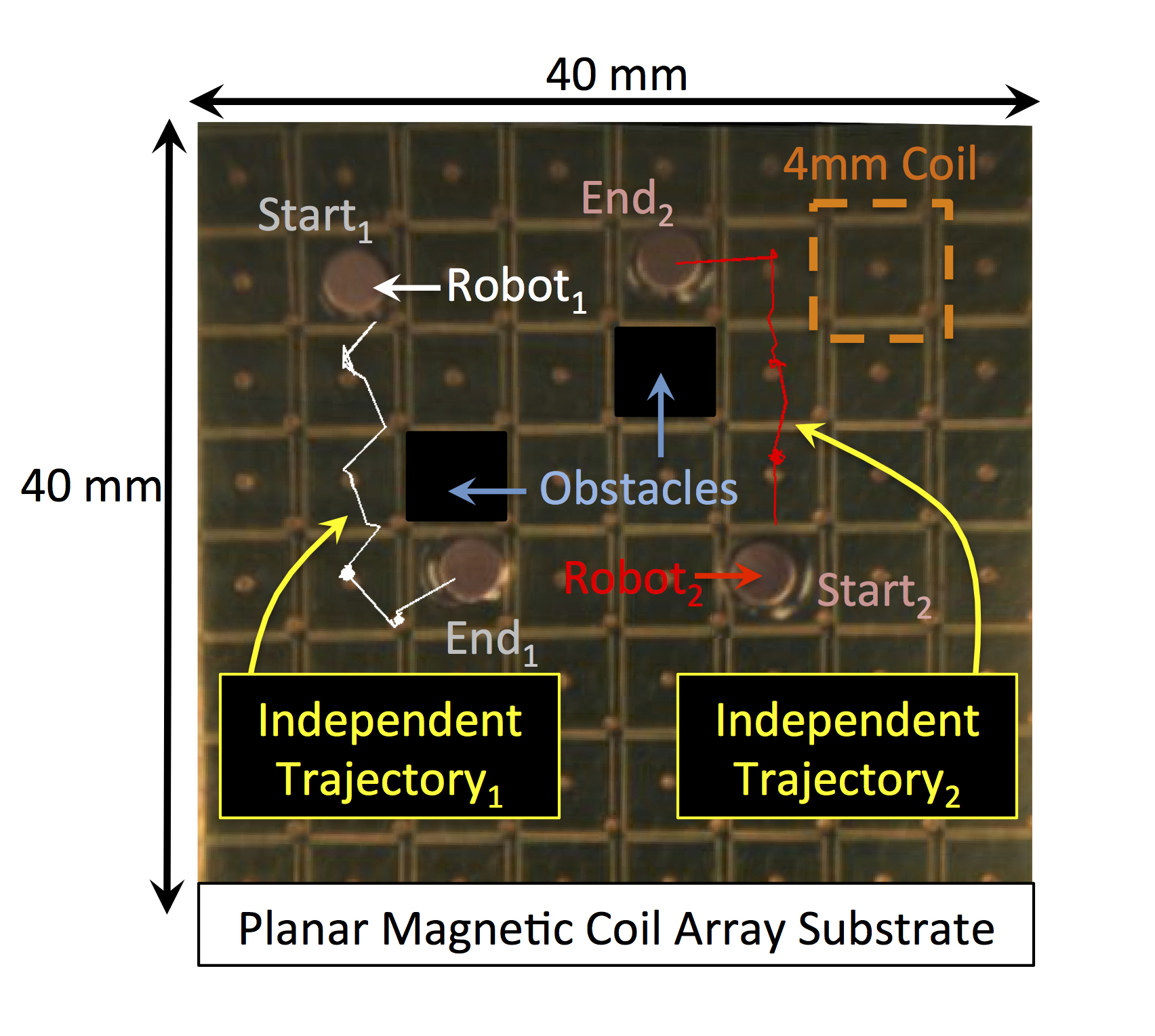
Since the robots are too small to come equipped with an on-board power source, the team needed to develop a way to power them externally. What they came up with was a system for controlling the robots with individual magnetic fields from an array of tiny planar coils.
Next steps include determining exactly how to control each robot.
“We need to know, if a robot is here and it needs to go there, how much force needs to be applied to the robot to get it from point A to point B?” said Cappelleri. “Once you figure out what that force has to be, then we say, what kind of magnetic field strength do we need to generate that force?”
The team’s microbots are magnetic disks, about 2 mm in diameter, that slide across a surface. The researchers’ future goal is to minimize the size to about 250 microns in diameter— the size of a dust mite.
The robots are moved using attractive or repulsive forces and by varying the strength of the electrical current in the coils.
The researchers plan to gear their advance toward applications in manufacturing and medicine. Microbots equipped with probe-like “force sensors” might then be used to detect cancer cells in a biopsy.
“Cancer cells have different stiffness characteristics than non-cancer cells, and in some of our previous work we put force sensors on the end of these robots to figure out which ones are stiffer than others,” Cappelleri said.
Cappelleri envisions the robots being used to assemble components on a small scale in microscale additive manufacturing.
The independently controlled microbots could also be useful in building microelectromechanical systems (MEMS), tiny machines that could have applications in medicine and homeland security.
“So far people have been good at making MEMS devices containing different components,”said Cappelleri. “But a lot of times the components are made from different processes and then have to be assembled to make the final device. This is very challenging. We can instead assemble them with our robots. And on the biological side we might use them for cell sorting, cell manipulation, characterization and so on. You could think about putting the microcoils on the bottom of a petri dish.”
As part of the team’s ongoing research, it will attempt to use microscale prototypes to assemble components for MEMS devices.
Story via Purdue University.